1 线控底盘技术现状总结
线控转向
目前线控转向系统技术主要在研发阶段,从整车厂角度,已搭载该技术的量产车型仅英菲尼迪Q50一款车,泛亚和同济大学联合进行预研发,并没有 与零部件厂商合作。从供应商角度,目前博世、采埃孚等厂 商正积极研发做样件,但还未在整车上搭载,博世线控转向系统采用的是双冗余全备份方案。
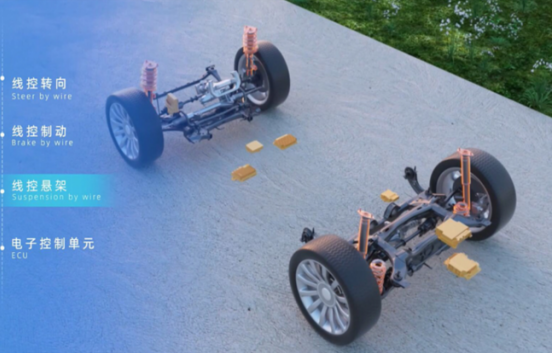
线控制动
目前市场上线控制动技术主流的路线是电子液压制动(EHB)系统,且已经有多款量产产品,如博世的 iBooster 、大陆的MK C1等 。 电子机械制动(EMB)系统由于技术不够成熟,目前仍处于研发阶段。
线控驱动
针对传统内燃机汽车,线控驱动技术(线控油门)目前在乘用车和商用车上普遍应用,市场占有率达99%以上;针对新能源汽车,线控驱动技术已经全面应用,现在正处于集中电机驱动阶段,随着电气化水平的提高,未来将向以轮边电机和轮毂电机为代表的分布式驱动发展。
线控悬架

线控悬架虽能自动调节线控弹簧的刚度、车身高度以及减震器阻尼,但由于重量、成本和可靠性的原因,目前属于非刚需配置,主要在C级和D级车中配备。因此对于整车厂而言,线控减震器的装配优先级最高,其次是线控弹簧,最后是线控防倾杆。从发展潜力上讲,线控空气弹簧、CDC/MRC型线控减震器的未来发展前景相对较好。
2 线控底盘技术难点总结
线控转向
线控转向技术的应用核心难点是系统的安全性和可靠性。由于线控转向系统方向盘和转向轮之间没有直接的机械连接,当线控转向系统出现故障时,车辆将无法保证转向功能,会处于失控状态。虽然目前采用冗余措施,但也仅能一定程度上提高可靠性,目前的控制器在故障诊断和处理能力上还需要进一步提升。另外,路感模拟技术也是线控转向系统的技术难点之一。
线控制动
电子液压制动(EHB)系统相较于电子机械制动(EMB)系统要成熟的多,目前在应用上几乎没有太大的难点。EMB系统应用落地的主要难点有:(1)没有备份系统,对安全性要求极高;(2)刹车力不足问题,需要提 供足够多的能量;(3)工作环境恶劣,如高温、震动等。

线控驱动
针对传统内燃机汽车,线控驱动技术目前没有应用难点,随着自动驾驶等级的提高,优化冗余备份及提高功能安全等级即可;针对新能源汽车,线控驱动技术难点:在电机方面,包括永磁同步电机效率的提升,轮边、轮毂电 机技术的突破,比如冷却技术、集成技术等;在电控方面,IGBT散热技术、封装技术、布局优化等需要解决,随着自动驾驶等级的提升,电机控制器功能安全的等级也需要随之升级。
线控悬架
线控悬架并非新潮事物,除了购置成本较高外,硬件层面并未特别的技术难点。由于线控悬架系统需要连续调控四个独立悬架系统的刚度和阻尼,属于闭环自适应控制系统,因此软件层面的复杂控制算法调校是其主要应用难 点。线控悬架通常采用PID控制机理实现自反馈,以车身垂直加速度为控制器的输入量,调节车身加速度使其达到理想要求,具体参数通常需要经过仿真测试以及实车调校后才能最终确定下来。
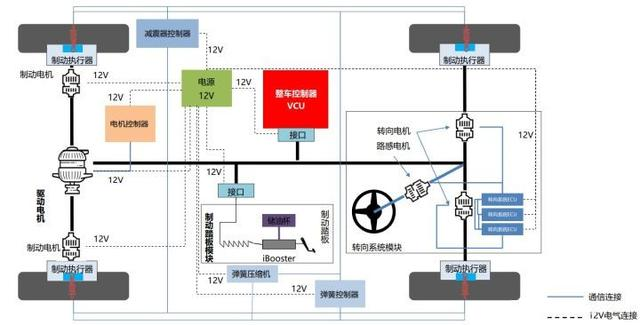
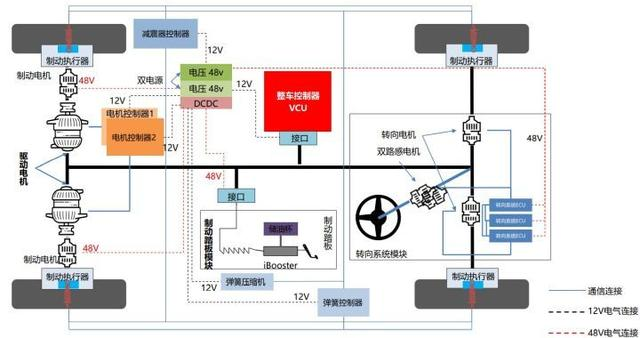
3 线控底盘系统电气架构现状
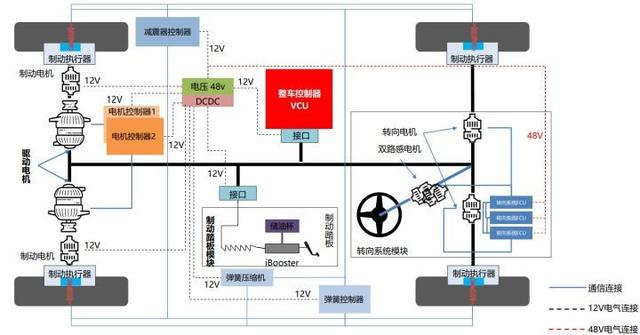
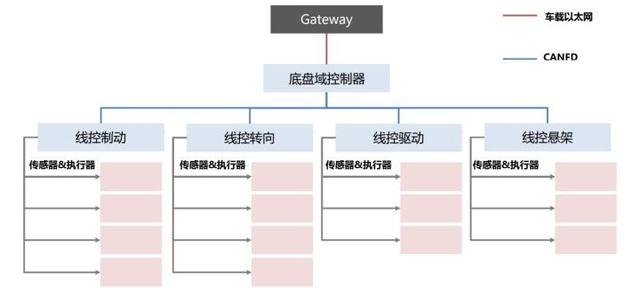
4 线控底盘系统电气架构趋势(3~5年)
6 L3/L4/L5级别下线控技术路线总结
6.1 各子系统总结
线控转向
针对L3/L4级别自动驾驶,EPS和线控转向技术路线为:(1)软硬件冗余备份路线:电机冗余采用六相电机(双三 相电机),ECU冗余是进行双备份设计,即芯片、电路板等均采用两套零件,ECU控制采用PID算法;(2)总线 技术方案:ECU与执行机构沟通交流使用CAN FD总线
针对L5级别自动驾驶,线控转向技术路线为:(1)软硬件冗余备份路线:硬件上转向电机、路感电机和方向盘等 取消,以轮毂电机实现其功能。对ECU进行冗余备份,即芯片、电路板等均采用两套零件;ECU控制算法除了PID 算法外还可能会使用模糊算法、神经网络等;(2)总线技术方案:车载以太网将成为解决方案之一。
线控制动
针对L3/L4级别自动驾驶,线控制动技术路线为:采用EHB技术路线;(1)软硬件冗余备份路线:采用主制动系 统+辅制动系统硬件架构、主制动系统ECU采用双芯片设计、电源系统采用双电源设计;(2)总线技术方案:L3 级别下可使用CAN FD总线;L4级别下可使用CAN FD或车载以太网;
针对L5级别自动驾驶,线控制动技术路线为:采用轮毂电机方案;(1)软硬件冗余备份路线:ECU选用高性能多 核芯片,双备份;电源系统采用双48V电源设计;(2)总线技术方案:选用车载以太网。
线控驱动

针对L3/L4级别自动驾驶,线控驱动技术路线为:针对内燃机汽车:使用电子节气门体,通过ECU来控制进气量; 针对新能源汽车:使用永磁同步电机的集中驱动方案;(1)软硬件冗余备份路线:针对内燃机汽车:进行线控燃 油系统传感器备份;针对新能源汽车:进行电机控制器软硬件冗余备份,以及传感器的冗余备份;(2)总线技术: 线控驱动大脑或底盘域控制器与整车VCU沟通交流使用CAN FD。
针对L5级别自动驾驶,线控驱动技术路线:针对内燃机汽车:使用电子节气门体,通过ECU来控制进气量;针对 新能源汽车:使用轮边电机或轮毂电机的分布式驱动方案;(1)软硬件冗余备份路线:轮毂电机或轮边电机互为 冗余备份,电机控制器软硬件冗余备份;(2)总线技术方案:线控驱动大脑或底盘域控制器与整车VCU沟通交流 使用车载以太网。
线控悬架
线控悬架系统从影响车辆自动驾驶行为角度上考量,并非刚需配置。线控悬架系统的发展路径更多的以技术成熟 度和经济性角度自我发展为主。
6.2 底盘集成方案总结
线控底盘集成系统,针对L3/L4级别自动驾驶,线控底盘集成方案:中央传动驱动+EHB+EPS+空气弹簧 +CDC型减震器/MRC型减震器悬架;总线技术为:底盘域控制器与VCU沟通使用CAN FD或者车载以太网。
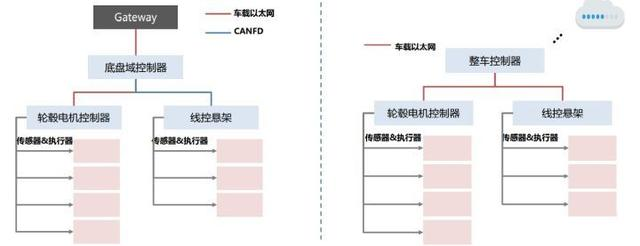
针对L5级别自动驾驶,线控底盘集成方案:轮毂电机分布式驱动+空气弹簧+CDC型减震器/MRC型减震器悬 架;总线技术为:1. 底盘域控制器与VCU沟通使用车载以太网,与底盘各零部件控制器使用车载以太网或 CAN FD连接;2. 使用汽车云端计算技术,整车控制器与云端通过网络连接,整车控制器与线控底盘各零部件 控制器通过车载以太网连接。
7 技术总结
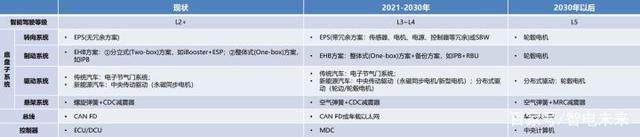
7.1 与上一代变化点
现状
转向系统:与液压动力转向相比零件更少,只在转向时电动机提供助力,减少能耗;
制动系统:用一个综合制动模块(电机、泵、高压蓄能器等)来取代传统制动系统中的压力调节系统,并可分别对四个轮胎的制动力矩进行单独调节;
驱动系统:对于传统汽车,取消了拉杆/拉索等机械部件,通过电子信号控制进气量;对于新能源汽车,电机控制器接收整车VCU发来的扭矩信号,并输出给驱动桥 上的电机进行车轮驱动(中央传动驱动);
悬架系统:换装CDC性减震器,自适应调节悬架阻尼,降低垂直方向加速度,大幅 提高驾乘舒适性。
2021-2030年
转向系统:在上一状态的基础上做传感器、电机、电源、控制器等的冗余;
制动系统:由分立式结构升级为整体式结构,并增加一套备用系统;
驱动系统:对于传统汽车,增加电子节气门系统部分传感器的冗余备份;对于新能源汽车,增加了电机控制器的冗余备份,电机无冗余备份方案;
悬架系统:将传统螺旋弹簧改为空气弹簧。
2030年以后
转向系统:硬件上取消方向盘、电机等,通过轮毂电机实现转向功能;
制动系统:无液压结构,直接通过轮毂电机实现制动;
驱动系统:由驱动桥上的电机集中控制变为分散到各个车轮上电机分布控制;
悬架系统:CDC型减震器换装MRC型减震器。
7.2 变化原因
现状
转向系统:液压助力结构布置较复杂,且组成部件较多,维修维护较EPS麻烦且复 杂;
制动系统:传统制动系统加入ABS、TCS、ESP等电子控制系统后结构和管路布置复杂,液压或空气回路泄露的隐患加大,装配和维修难度较大;
驱动系统:对于传统汽车,传统机械式节气门控制精度差,不利于发动机节油和排 放性能的提高;对于新能源汽车,由于采用电机驱动,电机无法通过机械系统控制, 所以必须使用线控驱动系统;
悬架系统:CDC型线控减震器根据行车姿态自适应调节悬架阻尼,且成本相对空气弹簧低廉。
2021-2030年
转向系统:对EPS做好冗余备份也可以实现L3~L4级的自动驾驶,SBW是非必须的,SBW的可靠性是核心瓶颈;
制动系统:提高集成度,降低成本,增加系统安全可靠性;
驱动系统:随着自动驾驶等级提高,为了确保系统安全可靠性,需提供电机控制器的冗余备份,但由于电机的体积、重量、成本等因 素以及各电机可以互为冗余备份,故无电机冗余方案;
悬架系统:灵活调节车身高度和悬架刚度,提升车辆通过性或操控性。
2030年以后
转向系统/制动系统/驱动系统:轮毂电机系统使得整车结构更加简单,可利用空间增大,传动效率提高,并同时集成了 转向、制动、驱动功能,更利于L5级别自动驾驶下的整车控制,符合未来汽车轻量化、集成化、自动化等发展趋势;
悬架系统:MRC减震器响应速度快,调节幅度增大。
7.3 总结(3-5年内方案)
转向系统:以EPS(带冗余方案:传感器、电机、电源、控制器等冗余)方案为主,总线采用CAN FD;
制动系统:将继续以EHB为技术路线,整体式(One-box)方案+备份方案将是主要线控制动方案,总线采用CAN FD或车载以太网;
驱动系统:主流方案以电机节气门系统与中央传动驱动系统为主,分布式驱动(轮边/轮毂电机)将得到发展,总线采用CAN和CAN FD;
悬架系统:悬架系统与自动驾驶相关性不高,更多沿着技术成熟度和经济性角度自我发展。线控悬架系统未来在空气弹簧+CDC减震器系统的基础上会接入更多车联网和ADAS信号,智能前馈性能逐步提升。 总线未来主要采用CAN和CAN FD。
本文来源:author,SENIA编审,版权归原创作者及其机构所有,分享仅用于学习、交流,如有侵权请告知,我们会及时处理,转载请注明出处。
投稿渠道:欢迎新技术、新工艺、新产品、新材料、前沿科技以及赛道生态投稿,
官方投稿邮箱:secma_hr@126.com